
Научная деятельность Электротехнического факультета осуществляется кафедрами:
— Автоматика ⇓
— Прикладная математика и ракетодинамика ⇓
Научная деятельность кафедры «Автоматика»
1. Робототехника
Научный руководитель — доктор технических наук,
профессор Войнов И.В.
Миасская робототехника «родилась» в конце 80-х годов. В 1986 году произошла авария на Чернобыльской АЭС, и во время устранения последствий обнаружилось, что ни у страны, ни в мире фактически нет тяжелого транспортного оборудования, чтобы в автономном или дистанционном режиме долговременно заниматься дезактивацией заражённой территории. Импортная техника, проработав несколько часов, благополучно «кончалась». После этой аварии фактически начали создаваться аварийно-технические центры Министерства атомной промышленности, разрабатываться тех.задания на робототехническое и транспортное оборудование для работы в условиях сильных радиационных полей.
Сотрудники филиала в те годы занимались созданием тяжёлого манипулятора «Кобра» и специализированного гусеничного шасси с изменяемой геометрией (способного изменять собственную длину/базу, ширину/колею, подниматься «на цыпочки»).


Официально лаборатория робототехники появилась в составе филиала в 2002 г. Заведующим назначен Борис Александрович Морозов. За годы работы над специализированной техникой, системами управления и программным обеспечением сформировались 4 направления:
- Роботы-сапёры (дистанционно-управляемые гусеничные роботы с манипулятором для извлечения и транспортировки взрывоопасных предметов, осмотра опасных территорий)

Сапёрный робот «Богомол» совершил десятки боевых разминирований в подразделении взрывобезопасности г. Екатеринбурга и в подразделении ОМОН г. Челябинска. 
Схват «Богомола»: два глаза-камеры — совсем как у человека - Роботы для «РосАтома» (дистанционно-управляемые радиационно-стойкие гусеничные роботы среднего класса грузоподъемности до 30 кг для работы на объектах «РосАтома»: с манипулятором для транспортировки предметов, с манипулятором для выполнения операций инструментом (сварка, демонтаж резьбовых соединений), с манипулятором для прокладки электрических кабелей питания).

«Мустанги» трудятся в паре: один работает электроинструментом, другой обеспечивает ему электропитание 
Пуль управления «Мустангами» простой и удобный - Автоматические установки для работы в агрессивных средах (специализированные установки, манипуляторы и соответствующее программное обеспечение для выполнения ряда операций в автоматическом режиме с целью уменьшения влияния агрессивных факторов на персонал).

Установка дозирования растворов 
Установка высокоточного измерения и автоматической сортировки заготовок 
Система очистки транспортных коридоров 
Установка утилизации стеклопосуды - Учебные робототехнические системы (малогабаритные манипуляторы, в том числе с системой технического зрения, распознавания предметов).

«Роботята» по сравнению с сапёрными «Богомолами» были очень маленьким, зато брали числом: за полтора года филиал собрало сотню учебных экземпляров 
Шаговые двигатели и тросиковые приводы были у всех роботят, а вот камеры — только у половины
Заказчики:
ООО «Урал-Вымпел», г. Екатеринбург;
ОМОН, г. Челябинск;
ПО «Маяк», г. Озерск;
ИФТП, г. Москва;
ИТУЦР, г. Москва.
Основные результаты:
1) Свыше 20 статей, в т.ч. 15 статей в журналах, рекомендованных ВАК;
2) 6 патентов РФ на изобретения, промышленные образцы и полезные модели;
3) ОКР с объемом финансирования более 10 млн. рублей.
Роботы-сапёры серии «Богомол-3» уже 20 лет успешно работают в подразделении взрывбезопасности г. Екатеринбурга и в подразделении ОМОН г. Челябинска. Они совершили десятки боевых разминирований.
РТК «Богомол-3», РТК-600 и РТК «Разведчик» защищены патентами РФ на изобретения и промышленные образцы.
Перечисленные роботы демонстрировались на выставках и участвовали в соревнованиях. Робот-сапер «Богомол-3С» успешно выступил в июне 2016 г. на соревнованиях под эгидой Минобороны РФ.
По заказам Росатома спроектированы и изготовлены 60 уникальных установок, на некоторые получены сертификаты федерального агентства РФ по техническому регулированию и метрологии об утверждении типа средств измерения.
По направлению «Робототехника» совместно с преподавателями Уральского института ГПС МЧС России издано учебное пособие «Мобильные роботизированные комплексы». – Екатеринбург. – 2015. – 58 с.
По робототехническому направлению ежегодно готовятся не менее трёх научных докладов в рамках НИРС.
2. Механика управляемых систем тел
Научный руководитель — доктор физико-математических наук,
профессор Телегин А.И.
Разработаны методы:
- табличного описания структурных, геометрических и инерционных параметров систем тел;
- автоматического выписывания уравнений кинематики, статики и динамики систем тел с явно выраженными параметрами;
- автоматической генерации X3D-моделей механических систем с анимацией программных движений;
- синтеза систем тел с заданными динамическими свойствами;
- синтеза адаптивных ПИД-регуляторов программных движений.
В 2015 году исследовательская работа была поддержана грантом на сумму 400 000 рублей на два года от фонда содействия развитию малых форм предприятий в научно-технической сфере для выполнения НИР «Разработка методического, алгоритмического и программного обеспечения автоматической генерации Х3D-моделей управляющих механических систем для решения задач механики и управления роботизированным производством». По результатам первого года исследований разработано методическое и программное обеспечение генерации Х3D-моделей механических систем с анимацией программных движений. Методическое и программное обеспечение внедрено в учебный процесс по дисциплинам «Электромеханические системы», «Автоматизированные информационно-управляющие системы».
Ежегодно по данному направлению к НИРС привлекаются до 5 студентов ЭТФ. Результаты своих научных исследований они докладывают на весенних научно-практических конференциях ЮУрГУ.
 |
 |
 |
Участники:
доктора и кандидаты наук;
студенты и аспиранты ЮУрГУ.
Основные результаты:
1) Свыше 50 статей, в т.ч. 18 статей в журналах, рекомендованных ВАК;
2) 6 монографий;
3) Свидетельство о государственной регистрации программы для ЭВМ;
4) НИР на сумму 400 тыс. рублей.
3. Нетрадиционные возобновляемые источники энергии
Научный руководитель — доктор технических наук,
профессор Четошникова Л.М.
Исследуется возможность использования нетрадиционных возобновляемых источников энергии (НВИЭ) в системе электроснабжения малых потребителей. К таким источникам в регионе относятся ветер, малые реки, солнце. Наш регион располагает большими потенциальными ветроэнергетическими ресурсами (около 28597 МДж/м2 за год). Потенциальные ресурсы в данной зоне составляют 3600 МДж/м2 за год, а полезная энергия — 1260 МДж/м2. Потенциал солнечной энергии по районам Челябинской области составляет до 1200 кВт ч/м2. Малая гидроэнергетика может стать одним из приоритетных направлений в вопросе обеспечения региона энергией. Общее количество рек в Челябинской области превышает 3,5 тысячи, но абсолютное большинство их (98%) относится к очень малым, длиной менее 10 км.
Научные исследования ведутся сотрудниками кафедры «Автоматика», а также студентами. Аспиранты кафедры участвуют в ежегодных научно-практических конференциях ЮУрГУ, всероссийских и международных конференциях. Результаты исследований публикуются в научных изданиях. Для проведения экспериментальных исследований создана лабораторная база с использованием современных средств по исследованию преобразования солнечной, ветровой и других видов энергии в электрическую.
Изданы методические пособия «Нетрадиционные возобновляемые источники энергии» и «Электроэнергетика» (часть I и II), используемые в учебном процессе и при выполнении выпускных квалификационных работ. По указанному направлению готовятся доклады, с которыми студенты выступают на ежегодных практических конференциях студентов ЮУрГУ (не менее 5 человек).
 Участники:
Участники:
доктора и кандидаты наук; студенты.
Основные результаты:
Опубликовано более 10 статей, в т.ч. 6 статей в журналах, рекомендованных ВАК.
Научная деятельность кафедры «Прикладная математика и ракетодинамика»
Ракетостроение и ракетодинамика
Научный руководитель — кандидат технических наук,
доцент Киселёв В.И.
Разработан и внедрен ряд методов решения многокритериальных задач аналитического синтеза управляемых систем, в том числе метод последовательной поэтапной редукции основной задачи управления к задаче нелинейного программирования с известными численными методами решения. Этот метод применён для решения терминальных задач оптимального импульсно-параметрического управления полётом спускаемых управляемых капсул. Разработано информационно-алгоритмическое и программно-математическое обеспечение задач расчёта динамики движения и синтеза управления спускаемыми и летательными аппаратами.
Научно-образовательный центр «Ракетостроение» (НОЦ «Ракетостроение») создан в филиале ЮУрГУ города Миасса в конце 2015 года в рамках инфраструктурного проекта по подготовке кадров для предприятий оборонно-промышленного комплекса РФ.
В состав НОЦ «Ракетостроение» входят специализированные учебно-исследовательские лаборатории:
Лаборатория №1 «Моделирование динамики и управления движением ЛА».
Лаборатория №2 «Летательные аппараты и двигательные установки летательных аппаратов».
Лаборатория №3 «Строительная механика и динамика конструкций ЛА».
Лаборатория №4 «Материаловедение и контроль качества».
Лаборатория №5 «Газовая динамика».
Лаборатория №6 «Теплотехника и термодинамика».
Лаборатория №7 «ЭВМ и сети. Телекоммуникации. Защита информации.».
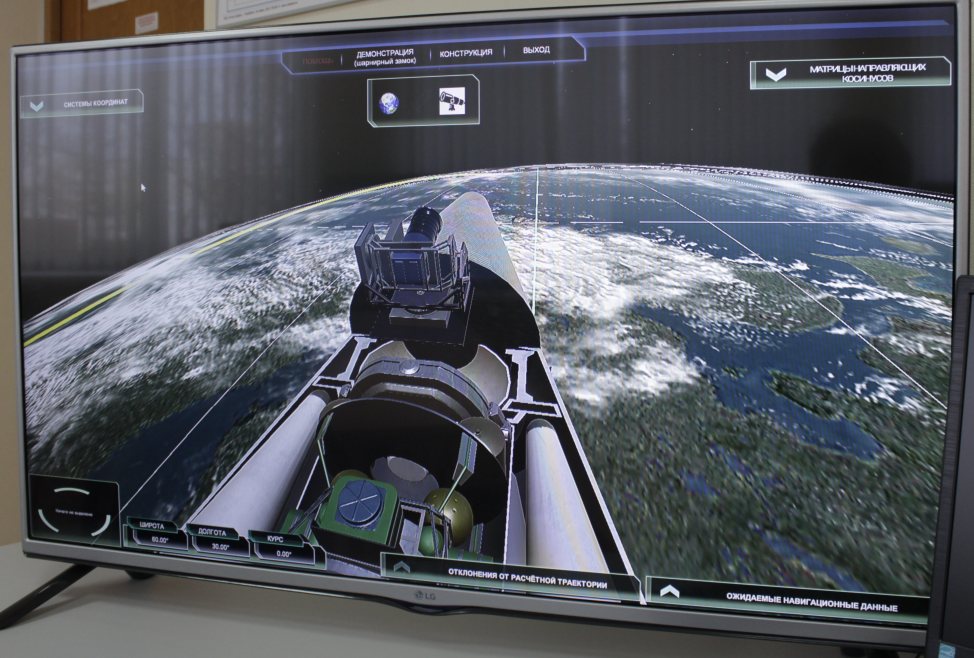
Лаборатория №8 «Основы автоматизированного проектирования ракетных и ракетно-космических комплексов».
 |
 |
На лабораторной базе НОЦ учатся студенты электротехнического факультета ЮУрГУ.
На этой лабораторной базе ежегодно ведутся ознакомительные инженерные мастер-классы для миасских старшеклассников.
 |
 |
Большая часть лабораторных стендов и тренажеров в составе НОЦ являются уникальной разработкой специалистов НОЦ и преподавателей кафедр филиала совместно со специалистами челябинской фирмы «Учтех-Профи».
 |
 |
Наряду с учебно-преподавательской деятельностью лабораторные мощности НОЦ «Ракетостроение» используются в инициативных и хоздоговорных научно-исследовательских и опытно-конструкторских работах (НИОКР).
Сотрудники НОЦ разработали, изготовили и успешно внедрили в эксплуатацию портальный робототехнический комплекс с семью степенями свободы, обеспечивающий физическое моделирование движения прототипа летательного аппарата в полусфере радиусом 1300 мм. Исследователям стали доступны вращательно-поступательные перемещения изделия, режим управляемой центрифуги, а также режим задания тестовых воздействий для калибровки навигационного оборудования изделия.
 |
 |
Сотрудники НОЦ и преподаватели кафедр активно участвуют в работах для АО «ГРЦ Макеева» по теме «Корона» – проработка облика многоразовой одноступенчатой ракеты-носителя с вертикальным взлетом и посадкой.
С АО «Миасский машиностроительный завод» согласовывается договорная работа по теме «Поиск эффективных методов построения и коррекции геометрии 3D-моделей с учетом поля допуска».
Этап согласования технического задания проходит разработка системы управления для беспилотного транспортного средства АО «Автомобильный завод «Урал».
Результаты исследований внедряются в учебный процесс по специальности «Проектирование, производство и эксплуатация ракет и ракетно-космических комплексов». Студенты ежегодно выступают с докладами на научно-практических конференциях ЮУрГУ, а выпускники защищают дипломные проекты по данной тематике.
Участники:
АО «ГРЦ Макеева», АО «ММЗ», АО «НПО электромеханики»;
доктора и кандидаты наук;
студенты, аспиранты и соискатели ЮУрГУ.
Основные результаты:
1) Свыше 100 статей, в т.ч. свыше 40 статей в журналах, рекомендованных ВАК, и свыше 60 статей в журналах, индексируемых в базе Российского индекса научного цитирования;
2) 4 монографии.